

About US
Welcome to Intelligent Control and Robotic Systems Lab !
We are interested in solving interdisciplinary engineering problems by applying engineering concepts and theories. Our primary research areas include robotic systems (design, construction, and control) and their applications.
We focus on design, modeling, and controls of robotic systems to provide new levels of adaptability, mobility, and manipulation. We are also interested in various types of robotic and autonomous systems. These include biologically inspired robots, soft robots, robots with advanced mobility and/or manipulation, and industrial applications. We have extensive expertise with motion control of robotic and autonomous systems, sensor fusion, SMA actuators, and bio-inspired/soft mobile robots. Please visit the Research and Publications pages to learn more.
We are always welcome applications of new Korean and international students and research fellows who are passionate and hard-working in robotics research and projects.
Contact Prof. Kim via ‘youngshik’ @ ‘hanbat.ac.kr’ if you are interested in our research and lab.
제어 로봇 시스템 실험실 소개
한밭대학교 제어 로봇 시스템 실험실에서는 로보틱스와 제어의 다양한 주제를 연구합니다. 특히, 로보틱스와 같은 융합적인 응용분야의 문제들을 공학의 개념과 이론을 바탕으로 효율적으로 다루기 위한 다양한 연구를 수행합니다.
현재 생체에서 영감을 얻은 다양한 로봇 시스템, 스마트 액츄에이터와 로봇응용, 그리고 진보된 이동성을 갖는 이동 로봇 시스템 연구를 수행하고 있습니다. 더 자세한 연구 및 과제 내용은 Research와 Publications 페이지를 참고하기 바랍니다.

연구장학생 모집
다양하고 독창적인 모바일 로봇 시스템의 설계와 제작, 시뮬레이션, 해석, 그리고 제어에 관심과 열정이 있는 성실하고, 진취적이며 창조적인 학생연구원 (R&D과제 참여 시 연구장학금 지급)을 수시 모집합니다.
- 지원자격: 로봇/제어 관련 학과 학생 (기계, 기계설계, 제어, 전기, 전자, 컴퓨터, 디자인 등)
- 한밭대 대학원 진학 희망자 우대
- 교육/훈련 및 연구 업무 :
- 설계 분야: CAD/CAE 기반 시스템 설계 (3D 모델링 및 해석) 및 시작품 제작
- 제어 분야: Matlab/Simulink, LabVIEW, 마이크로컨트롤러 (microcontroller: Arduiono 포함), 센싱, 수학 모델링, 시뮬레이션, 제어기 설계
- 컴퓨터 프로그래밍 분야: 비젼, 통신, AI 및 ICT 응용 알고리즘 개발
- 전기/전자 회로 설계 및 제어 등
연락처: 김영식 교수 (e-mail: youngshik @ hanbat . ac . kr, Tel: 042) 821-1163)
Lecture
Undergraduate Courses:
-
Automatic Controls (Control System Engineering)
-
Introduction to Robotics
-
Statics
-
Capstone Design (Senior Design)
-
Mechanical Engineering Laboratory
-
Programming Language (LabView)
-
Mechanical Measurements
Graduate Courses:
-
Advanced Robotics (Special Topics)
-
Linear Systems and Controls
-
Nonlinear Systems and Controls
연구 주제
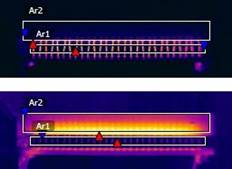
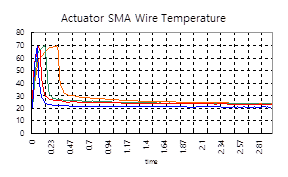
형상기억합금(SMA)을 응용한 스마트 액츄에이터
- SMA Torsional Actuator
- SMA Bidirectional Torsional Actuator
- Hybrid Actuator
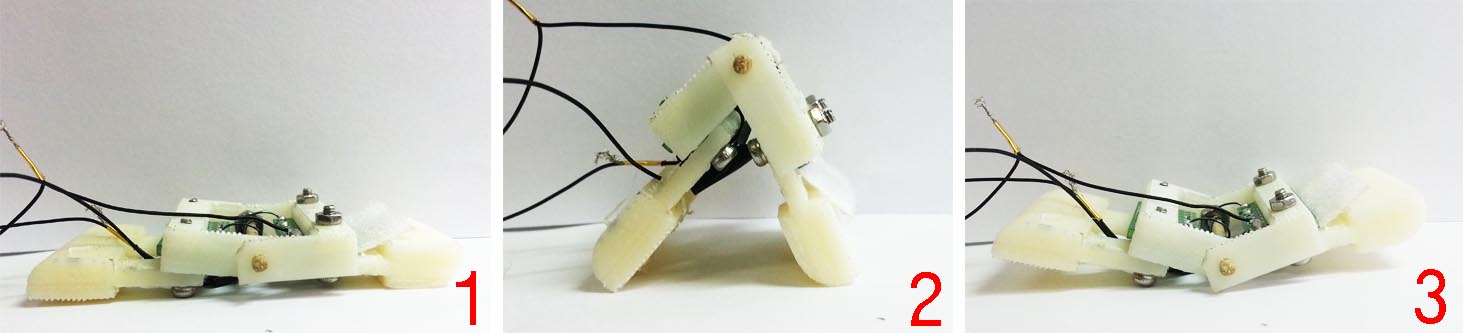
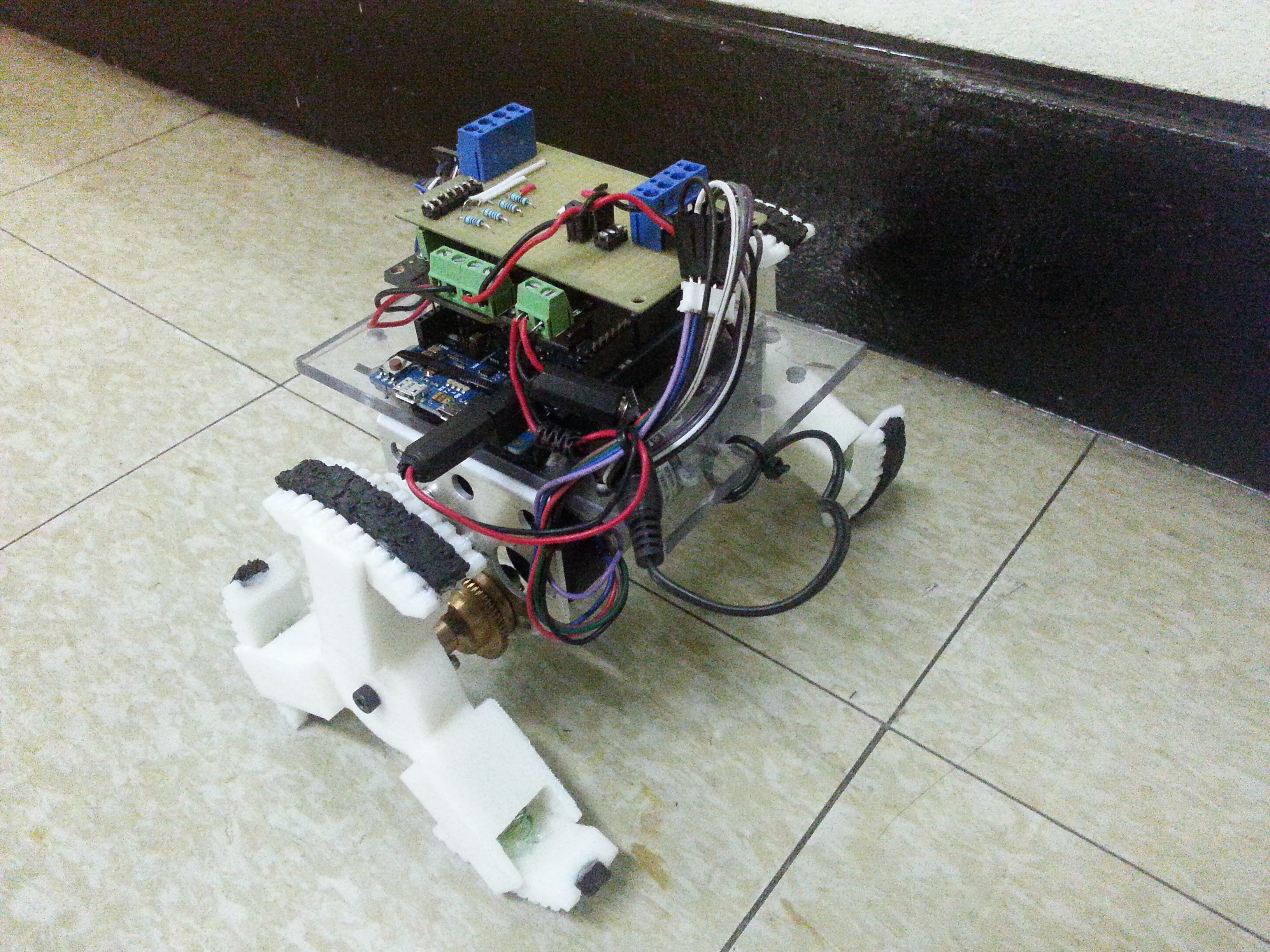
생체에서 영감을 얻은 로봇
- Dexterous Robotic Hand
- Soft Robot (Inchworm, Rolling, Insect-like robot)
- Wheel-Leg Robot
- Water Strider Robot
- Compliantly Framed Moduler Robot
모바일 로봇의 제어를 위한 기초, 원천 및 응용 연구
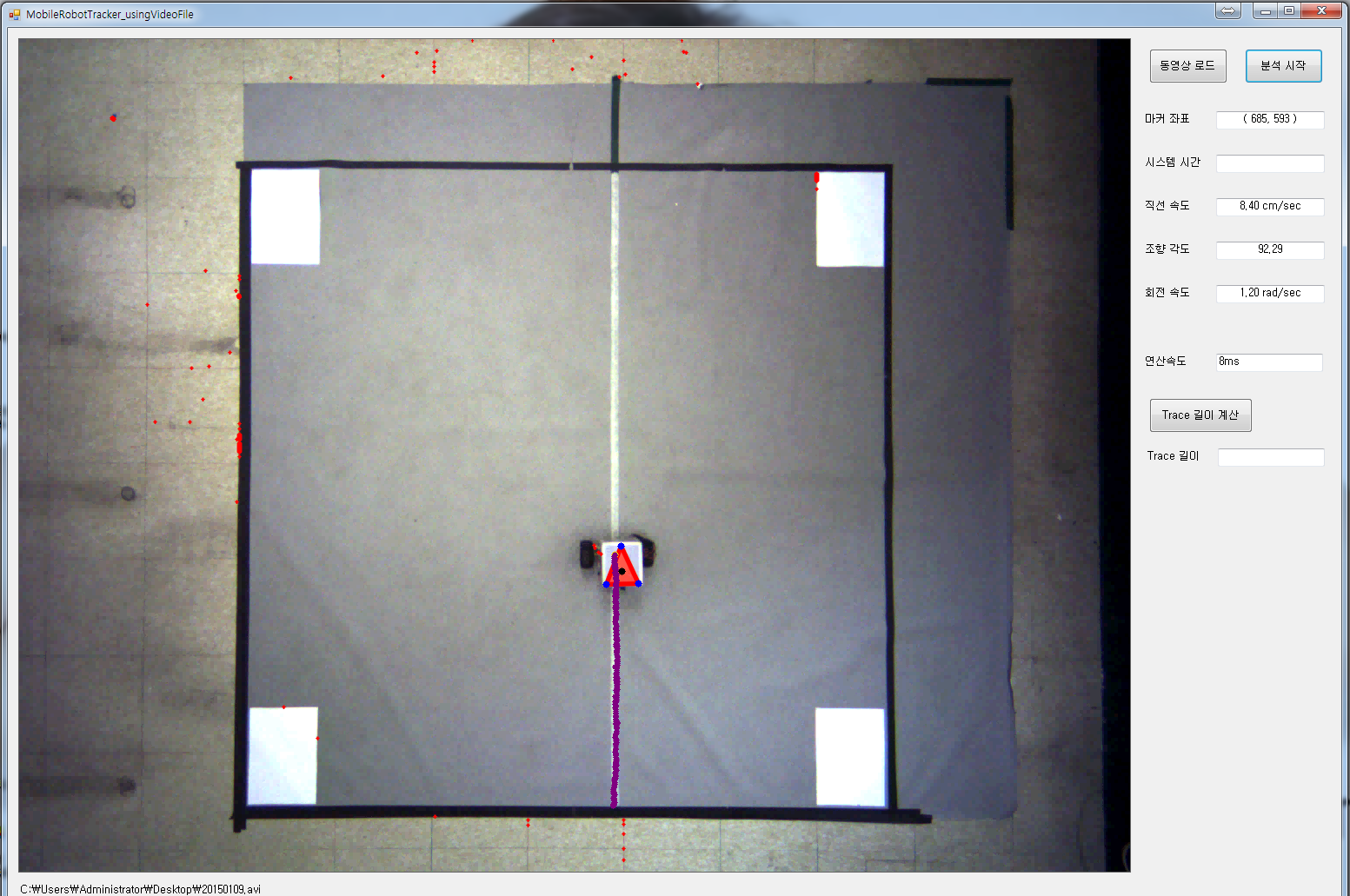
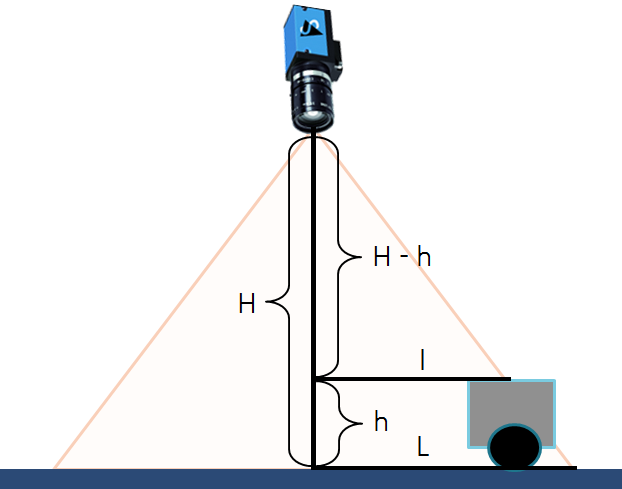
- Modeling and Motion Control of Wheeled Mobile Robots (WMRs)
- Modeling and Motion Control of Legged Robots
- Sensor Fusion for Localization
기타 로봇 및 자동화 시스템
- Personal Mobility (Unicycle, Segway)
- Drone (Quad-copter)
- Inverted Pendulum Robot
- Robot Arm
- Industrial applications