Hybrid Wheel-leg Mobile Robot: funded by Korean MEST
- Hybrid mobility of biologically inspired mobile robots
- Walking and running using compliant passive joints
Calibration-less trailer backing: funded by Kairos Autonomi co. and the University of Utah
- System identification
- Autonomous control

DARPA URBAN CHALLENGE 2007
- A steering algorithm for the vehicle
Nonholonomic control and motion planning: funded by NSF
- Developed new kinematic motion control laws for wheeled mobile robots
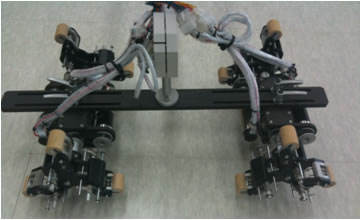
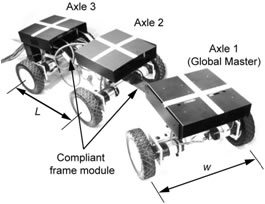
- Extended the control strategy for the multi-robot coordination using the Compliant Framed Modular wheeled Mobile Robot (CFMMR).
- Studied several different multi-robot configurations and their control algorithms.
- Evaluated controllers in hardware in loop using a dSPACE DS1103 system and Matlab/ Simulink.
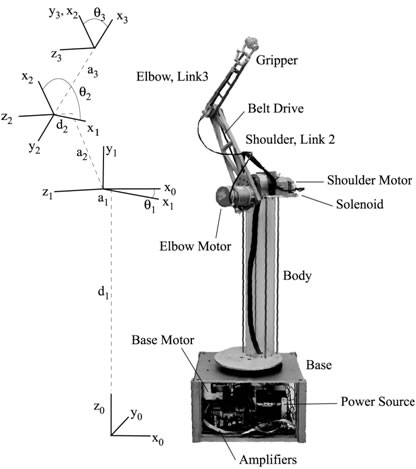
A ball-throwing robot arm: funded by University of Utah
- Designed and evaluated a robust controller for the robot arm.
- Implemented the controller to the robot using a dSPACE DS1103 system and Matlab/ Simulink.
Automation
- Development of an Antenna Positioner System (funded by Korea Small Business Administration)

- Development of a Ball-Grinding Machine (funded by Korea Small Business Administration)